Scienza
La nuova “pelle elettronica” ispirata all’occhio umano che cambierà la robotica industriale
Sensori capacitivi ispirati alla pupilla umana permettono ai robot industriali e agli aspirapolvere di “vedere” gli ostacoli a distanza e percepire il tocco leggero. Una rivoluzione per la sicurezza e l’automazione.
I robot che popolano le nostre fabbriche sono macchine straordinarie, capaci di una precisione millimetrica. Eppure, soffrono di un paradosso tecnologico che noi umani troviamo quasi comico: o sono miopi, o sono insensibili. Fino ad oggi, gli ingegneri si sono scontrati con un limite fisico dei sensori capacitivi. Un elettrodo piccolo garantisce una sensibilità tattile altissima, perfetta per manipolare oggetti fragili, ma non “vede” oltre pochi millimetri. Un elettrodo grande rileva la presenza di un umano a distanza, evitando incidenti, ma perde la finezza tattile, trasformando il robot in un elefante in una cristalleria.
Questo compromesso ha a lungo frenato l’efficienza del capitale investito nell’automazione collaborativa. Tuttavia, i ricercatori della South China University of Technology (SCUT) sembrano aver trovato una soluzione brillante, pubblicata sull’International Journal of Extreme Manufacturing. Hanno creato un array di sensori flessibili (PNR-PTSA) che copia semplicemente il meccanismo della pupilla umana.
Come funziona l’adattamento “pupillare” elettronico
L’idea, spiegata dal Dr. Xie, è di una semplicità disarmante. Quando leggiamo un libro, la nostra pupilla si restringe per mettere a fuoco i dettagli. Quando guardiamo una strada buia in lontananza, si dilata per raccogliere più luce. I ricercatori hanno applicato questa logica ai campi elettrici.
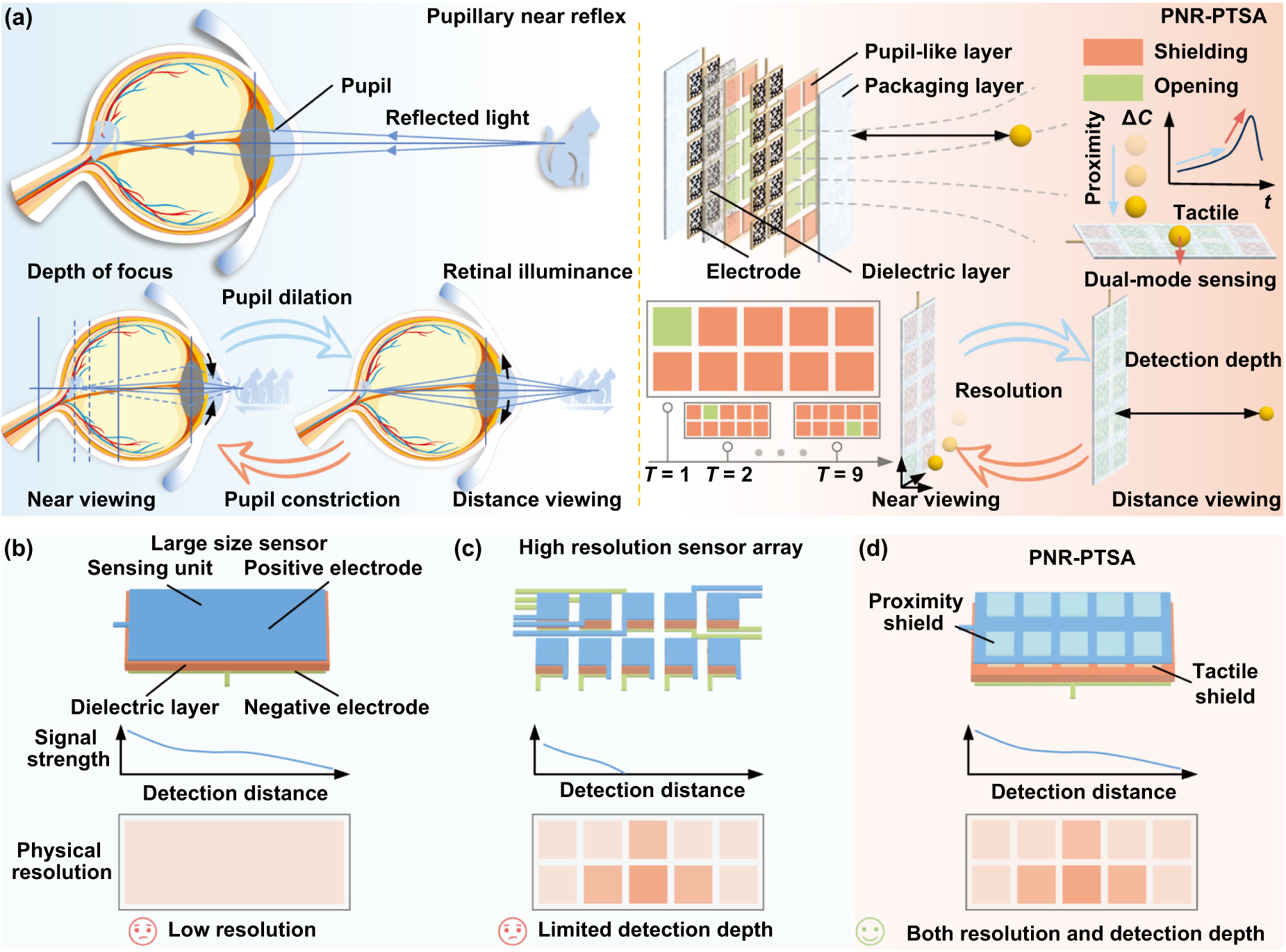
Schema dell’array di sensori trimodale di prossimità-contatto (PNR-PTSA) ispirato al meccanismo di riflesso pupillare da vicino. (a) Concetto di progettazione del PNR-PTSA. L’illustrazione a sinistra mostra che la pupilla umana si restringe per la visione da vicino e si dilata per la visione da lontano, bilanciando i dettagli e il campo visivo. L’illustrazione a destra mostra che il PNR-PTSA regola la profondità di rilevamento e la risoluzione di rilevamento modificando l’area aperta dello strato di schermatura simile alla pupilla. (b) I sensori di grande superficie hanno una profondità di rilevamento elevata grazie al loro elettrodo di grandi dimensioni, ma soffrono di una bassa risoluzione. (c) Gli array di sensori ad alta densità offrono un’alta risoluzione, ma mancano di un efficace accoppiamento tra gli elettrodi, con conseguente profondità di rilevamento limitata dalla forza massima teorica del campo frangente. (d) Il PNR-PTSA proposto disaccoppia le funzioni degli elettrodi e introduce uno strato di schermatura simile alla pupilla al posto degli elettrodi convenzionali per formare unità di rilevamento, consentendo sia un’alta risoluzione che una profondità di rilevamento regolabile.
Invece di usare elettrodi di dimensioni fisse, il nuovo design introduce uno strato di schermatura dinamica sopra una rete di elettrodi conduttivi. Modificando elettricamente l’area schermata, il sistema altera la forma e l’estensione del campo elettrico marginale (fringing field).
Se lo scudo restringe l’area, il sensore si concentra sui micro-dettagli tattili. Se lo scudo si espande, il campo elettrico viene proiettato nello spazio circostante, permettendo al robot di “sentire” l’avvicinarsi di un oggetto prima ancora del contatto. Un sensore che va perfino oltre il tatto, arrivando al contatto di prossimità.
I numeri della nuova frontiera sensoriale
Dal punto di vista ingegneristico, i risultati sono notevoli. L’architettura ha aumentato la profondità di rilevamento massima del 104,56% rispetto ai sensori a doppia modalità tradizionali.
Ecco un riassunto delle prestazioni tecniche:
| Parametro | Valore | Note |
| Distanza di rilevamento | > 90 mm | Sufficiente per arrestare un braccio robotico in movimento. |
| Range di pressione | 0 – 400 kPa | Rileva da pochi grammi a pressioni industriali elevate. |
| Sensibilità tattile | 3.38 \times 10^{-2} \{ pF·kPa}^{-1} | Ottenuta tramite dielettrici porosi. |
| Tempo di risposta | 40 – 70 ms | Ideale per la sicurezza in tempo reale. |
Per ottenere un’elevata sensibilità, il team ha utilizzato un metodo a stampo sacrificale (basato su particelle di zucchero) per creare micropori nei materiali dielettrici in Ecoflex. Inoltre, per massimizzare l’intensità del campo elettrico, gli elettrodi sono stati disegnati seguendo il modello frattale di Gosper.
Da un punto di vista matematico, i ricercatori hanno dovuto compensare la non linearità della compressione del materiale nella fase iperelastica. Hanno modellato la relazione tra pressione ($p$) e spaziatura degli elettrodi ($h$), per poi derivare la capacità ($C$). Le equazioni che governano questa fase ad alta pressione sono:
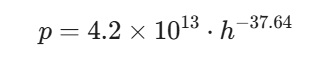
E la conseguente variazione di capacità:
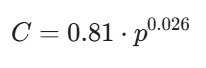
Questa modellazione permette ai chip di lettura di interpretare correttamente i dati fisici estremi.
Implicazioni economiche e applicazioni pratiche
Da una prospettiva industriale, la sicurezza sul lavoro e l’efficienza della linea di produzione sono beni rifugio. Un robot collaborativo (cobot) che non necessita di ingombranti gabbie di sicurezza e che riduce i tempi di inattività per collisione accidentale, giustifica rapidamente il proprio ammortamento.
Ma non si tratta solo di industria pesante. I ricercatori hanno testato la “pelle” sui robot aspirapolvere. Attualmente, i nostri costosi elettrodomestici intelligenti si bloccano regolarmente sui cavi di ricarica o si schiantano contro porte a vetri, poiché i sensori ottici e LiDAR sono inefficaci contro superfici trasparenti o ostacoli flessibili.
Il sistema PNR-PTSA risolve questo problema. Rileva i cambiamenti nel mezzo dielettrico circostante, identificando:
- Vetro trasparente.
- Cavi dati e piccoli oggetti.
- Superfici fonoassorbenti o nere che ingannano i laser.
La tecnologia non è però esente da difetti. I sensori capacitivi sono notoriamente sensibili al rumore elettromagnetico, un problema non da poco in una fabbrica piena di macchinari pesanti, ma i ricercatori confidano che futuri algoritmi di machine learning e schermature migliori possano filtrare queste interferenze.
In sintesi, la strada verso un’automazione veramente intelligente passa dall’hardware, non solo dal software. Investire nella sensoristica avanzata è il vero moltiplicatore keynesiano per la produttività industriale del prossimo decennio.

La Russia blocca l’export di nitrato di ammonio: la tempesta perfetta sui fertilizzanti e il rischio shock alimentare

Il grande freddo sul bando al petrolio russo: Bruxelles mette la retromarcia (e riscopre l’oleodotto Druzhba)

Un singolo gene dietro il 93% dei casi di Alzheimer: il cambio di paradigma che la scienza medica non si aspettava

Referendum: Una rondine non fa primavera

You must be logged in to post a comment Login