Economia
Il Lavoratore Centauro: come due gambe robotiche cinesi riscrivono la logistica e la fatica umana
Un team di ricercatori ha sviluppato gambe robotiche indossabili che trasformano i lavoratori in “centauri”, riducendo la fatica del 35% nel trasporto di carichi. Scopri la rivoluzione logistica che salva la schiena e ottimizza il lavoro.

L’innovazione tecnologica non passa solo per la brutale sostituzione del lavoro umano, ma, molto più spesso e in modo più intelligente, per il suo potenziamento. In un’epoca in cui la logistica, i trasporti fisici e i servizi di emergenza affrontano sfide di produttività e sicurezza crescenti, la soluzione potrebbe non risiedere in androidi autonomi, ma in una vera e propria simbiosi. Un team di ricercatori cinesi della Southern University of Science and Technology (SUSTech) di Shenzhen ha sviluppato una piattaforma robotica indossabile che trasforma l’operatore in un vero e proprio “centauro”. La ricerca, pubblicata di recente sull’autorevole International Journal of Robotics Research, non è solo una promessa, ma una soluzione ingegneristica pratica per abbattere drasticamente la fatica fisica.
L’approccio ibrido: oltre il limite dell’esoscheletro
A differenza dei tradizionali esoscheletri, che corrono parallelamente alle gambe dell’utente per assistere il movimento articolare e finiscono spesso per intralciare la fluidità naturale del passo, il sistema sviluppato dal team del professor Chenglong Fu adotta un paradigma radicalmente diverso. Le due gambe robotiche si aggiungono dietro l’operatore, agendo come arti aggiuntivi e indipendenti. Il risultato è un sistema quadrupede ibrido uomo-robot, dove le responsabilità operative sono nettamente separate e ottimizzate:
- L’essere umano mantiene il pieno controllo delle funzioni superiori: si concentra sulla navigazione, sull’equilibrio, sulla valutazione dei rischi e sulla direzione.
- Il robot svolge il “lavoro sporco”, facendosi carico del peso strutturale e fornendo la propulsione meccanica orizzontale necessaria ad avanzare.
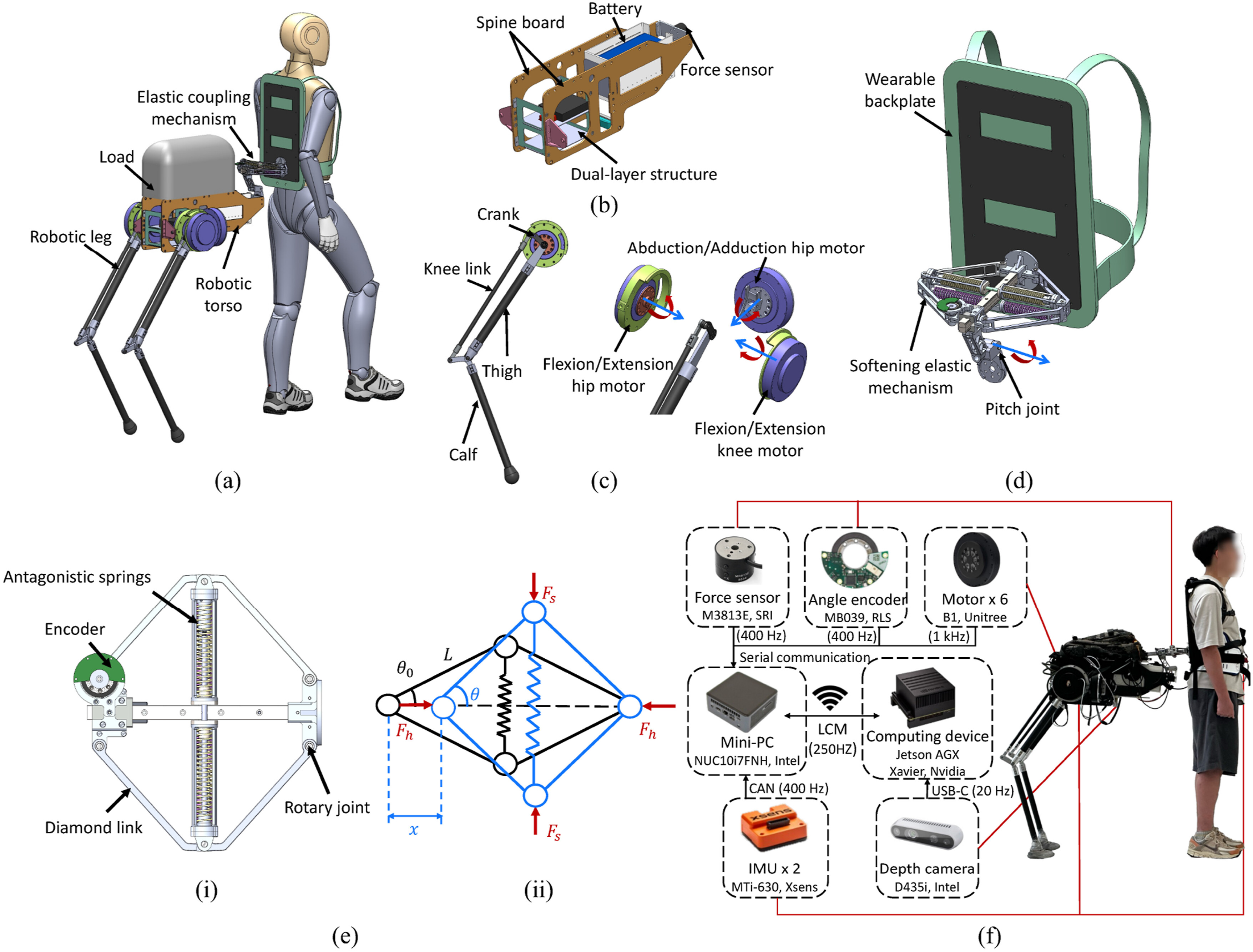
1. Progetto meccanico del robot Centaur. (a) Modello schematico 3D del sistema umano-Centaur. (b) Modello 3D del busto robotico. (c) Modelli schematici 3D di una gamba robotica. (d) Modello 3D del meccanismo di accoppiamento indossabile. In (c) e (d), le frecce blu e rosse indicano gli assi di rotazione e le rispettive direzioni. (e) (i) Modello CAD del meccanismo elastico. (ii) Diagramma schematico cinematico e di forza del meccanismo elastico. La configurazione nera rappresenta lo stato iniziale senza alcuna forza esterna applicata. La configurazione blu raffigura lo stato del meccanismo dopo essere stato compresso in avanti da uno spostamento x. (f) Configurazione hardware e struttura di comunicazione dati del prototipo Centaur.
Questa netta divisione del lavoro è resa possibile da un’innovativa interfaccia di accoppiamento elastico a rigidezza non lineare, posizionata sulla schiena dell’utente. Sotto carichi leggeri, la connessione rimane rigida per garantire la perfetta sincronizzazione dei movimenti. Quando il carico aumenta, il sistema diventa più flessibile e compliante, permettendo alla macchina di assorbire dinamicamente le forze di impatto e farsi carico del fardello. Il robot sfrutta inoltre un controllo predittivo del modello (Model Predictive Control) e una complessa pianificazione della traiettoria per mantenere il passo con l’operatore in ogni condizione, percependo le sue intenzioni senza bisogno di input manuali.
I Dati: Un Taglio Drastico ai Costi Metabolici
Per valutare l’efficacia del “centauro”, i test empirici hanno dimostrato risultati che potrebbero cambiare le prospettive della medicina del lavoro. Trasportare carichi pesanti su terreni irregolari è un collo di bottiglia storico, sia che si tratti di fanteria militare, di soccorritori in aree disastrate o di operai industriali in contesti non automatizzabili.
Ecco i risultati misurati in laboratorio e sul campo, testando il sistema con un carico di circa 20 kg (44 libbre):
| Parametro Analizzato | Variazione Misurata | Impatto Pratico e Clinico |
| Spesa Energetica Metabolica | – 35% | Minore affaticamento, maggiore autonomia di marcia e produttività. |
| Pressione Plantare sul Piede | – 52% | Prevenzione critica degli infortuni muscolo-scheletrici e articolari. |
| Variabilità dell’Ampiezza del Passo | Diminuita | Maggiore stabilità posturale, anche sotto stress e con pesi sbilanciati. |
Implicazioni Economiche e Logistiche
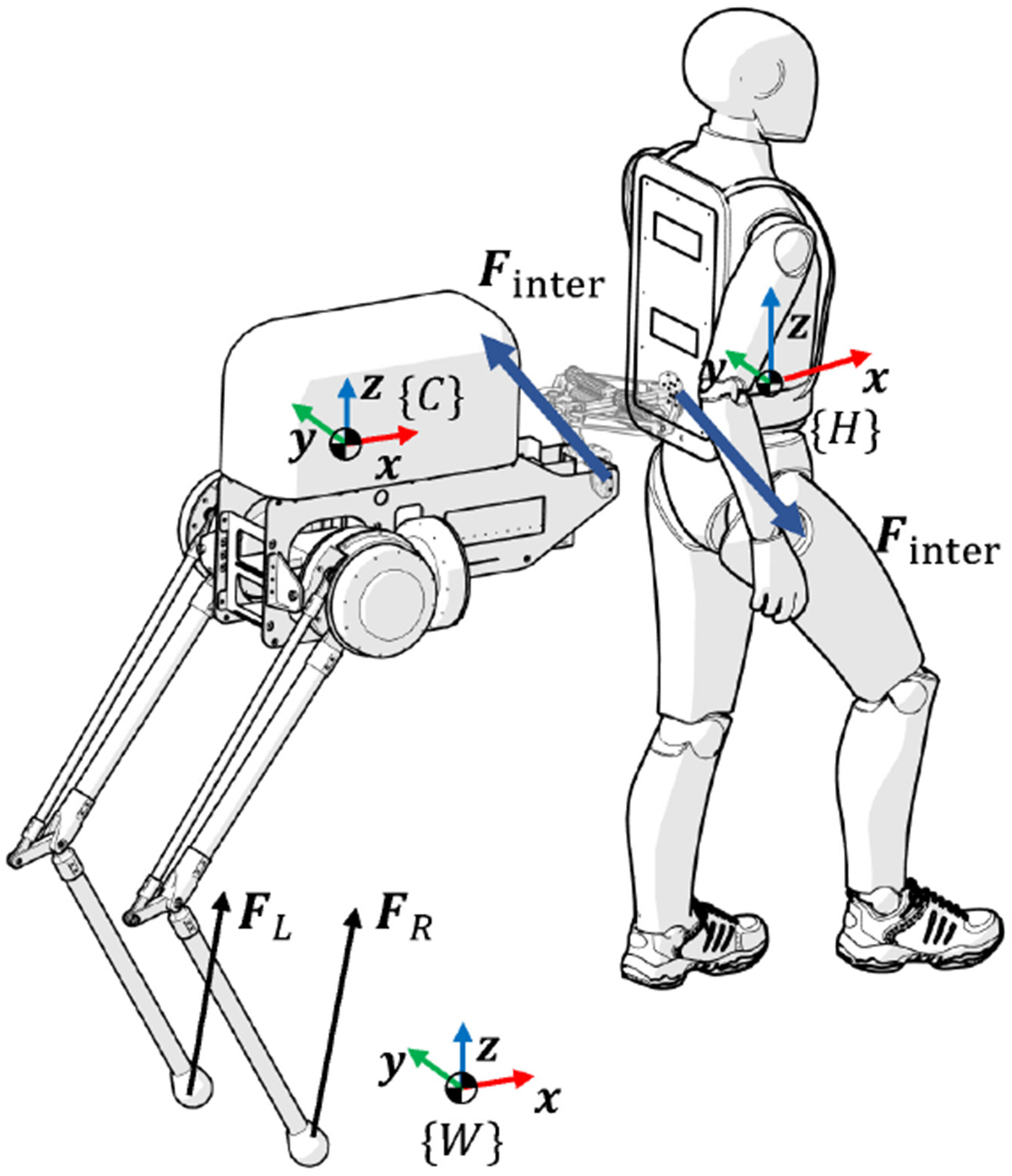
Immagine del robot-centauro e della sua connessione all’Uomo.
Da una prospettiva macroeconomica e squisitamente keynesiana, il valore del lavoro umano rimane il motore incontrastato dell’economia reale, ma deve essere supportato da investimenti mirati in capitale fisso che ne massimizzino la resa e ne tutelino l’integrità. Ridurre l’usura fisica del lavoratore significa abbattere i pesantissimi costi sanitari a carico del welfare e prolungare la vita attiva della forza lavoro in settori logoranti.
La narrazione dominante ama dipingere un futuro in cui l’automazione cancella il lavoro stipendiato. Tuttavia, in contesti ambientali non strutturati (come un bosco dopo una frana o un cantiere edile), affidare a un robot completamente autonomo la navigazione richiede una potenza computazionale enorme, spesso con esiti deludenti e costi proibitivi. Lo Stato o le grandi imprese potrebbero trovare molto più logico, ed economicamente sostenibile, investire in queste interfacce ibride.
Non siamo ancora arrivati al punto in cui i droni sostituiranno completamente la fanteria o le squadre di emergenza. L’evoluzione ingegneristica ci propone invece una sintesi molto pragmatica: un centauro cibernetico dove la mente umana guida, e l’acciaio robotico fatica. Un compromesso intelligente, che non cancella l’uomo, ma lo aiuta a sopportare letteralmente il peso del progresso.

You must be logged in to post a comment Login