Cultura
I microrobot che si parlano: nasce l’intelligenza collettiva acustica
Minuscoli robot imparano a collaborare usando il suono, formando sciami intelligenti capaci di auto-ripararsi e percepire l’ambiente. Una rivoluzione per medicina e robotica.
La fantascienza, a volte, ci azzecca. L’idea di sciami di minuscoli robot che agiscono come un unico organismo intelligente è da sempre un caposaldo dell’immaginario collettivo. Ora, un gruppo internazionale di scienziati ha trasformato questa visione in un modello scientifico concreto, pubblicando una ricerca su Physical Review X che potrebbe ridefinire i confini della robotica, della medicina e del risanamento ambientale. Hanno progettato dei microrobot che, ispirandosi a pipistrelli e balene, usano il suono per comunicare, coordinarsi e persino auto-ripararsi.
Il risultato è un sistema che manifesta un’intelligenza collettiva emergente, dove il tutto è molto più della somma delle sue semplici parti. Un concetto che, in fondo, non dovrebbe suonare nuovo a chi osserva i sistemi complessi.
Dalla Chimica al Suono: Un Salto Quantico
Finora, il coordinamento di sciami di “materia attiva” (particelle o robot capaci di auto-propulsione) si basava principalmente su segnali chimici. Un metodo efficace, ma con due grossi limiti: è lento, perché dipende dalla diffusione delle molecole, ed è a corto raggio. In parole povere, è come coordinare un’armata usando messaggeri a piedi.
La vera svolta di questo studio è l’uso delle onde acustiche. Il suono si propaga molto più velocemente, su distanze maggiori e con meno perdite di energia. Ogni microrobot è dotato di un minuscolo “altoparlante” e di un “microfono”. Seguendo due regole incredibilmente semplici, lo sciame prende vita:
- Muoviti verso il suono più forte: i robot sono attratti dalle zone dove il segnale acustico collettivo è più intenso.
- Sincronizza la tua emissione: ogni robot adatta la frequenza del proprio suono a quella che percepisce dal resto dello sciame.
Da queste due direttive elementari, senza nessun computer centrale o leader designato, emergono comportamenti complessi e coordinati che ricordano da vicino un organismo vivente.
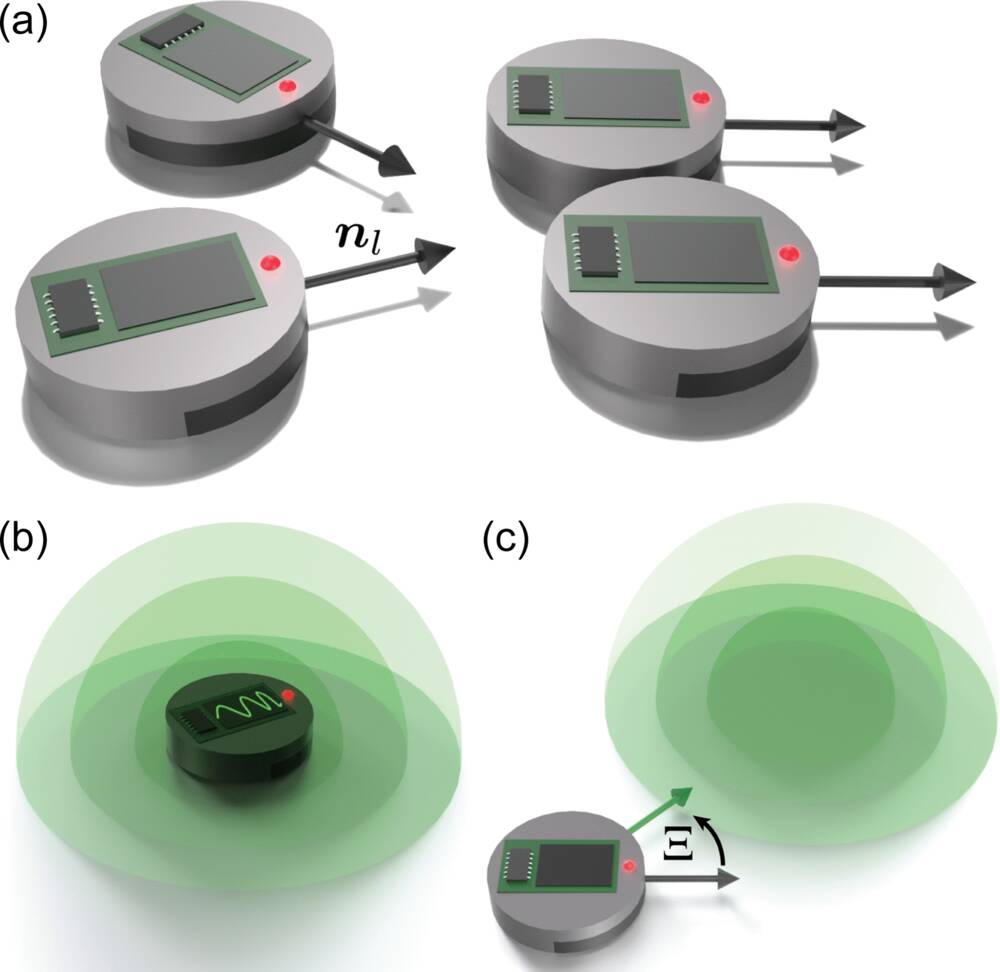
Materia attiva che comunica acusticamente. (a) Schema di sciami autopropulsi con allineamento polare. Le frecce indicano la direzione di movimento degli sciami, 𝒏𝑙. (b) I singoli sciami possiedono un oscillatore interno che controlla le loro emissioni acustiche. A loro volta, i loro stati oscillatori possono sincronizzarsi tramite il campo acustico. (c) Gli sciami si allineano verso ampiezze sonore più elevate con suscettibilità acustica. Da Physical review X
Le “Specie” Robotiche: un Bestiario Tecnologico
Il bello di questo sistema è che, a seconda di parametri come la velocità dei singoli robot o la loro sensibilità al suono, lo sciame si auto-organizza in “fenotipi” diversi, ognuno con una sua morfologia e un suo comportamento specifico. È quasi un’evoluzione convergente in silicio.
Ecco le principali “forme di vita” robotica osservate nelle simulazioni:
- Ammasso (Blob): Una struttura localizzata e stabile, con i robot orientati verso un centro che funge da “pacemaker”, emettendo onde sonore concentriche. Ideale per compiti stazionari.

Descrizione dello Stato Blob
- Larva: Una forma allungata che si muove lentamente ma con persistenza. Il suo movimento è generato da un’asimmetria nel posizionamento del “pacemaker” interno.
- Serpente (Snake): Uno sciame rapido e direzionale, in cui tutti i robot sono allineati e si muovono in modo coeso. Non ha un generatore di ritmo interno e le onde di fase si propagano dalla testa alla coda. Perfetto per esplorazioni veloci.

Funzioni emergenti, che si generano dal caos attraverso l’intelligenza collettiva
- Ouroboros: Essenzialmente una “larva” che si chiude su sé stessa, formando un anello rotante. Una struttura stabile che occupa uno spazio definito.
- Volvox: Un affascinante stato “chimera”, con un nucleo di robot perfettamente sincronizzati circondato da uno strato esterno di agenti caotici e desincronizzati.
Funzionalità emergenti: dalla percezione all’auto-guarigione
È qui che il modello diventa davvero impressionante. Questi sciami non si limitano a muoversi in modo coordinato; sviluppano funzionalità di livello superiore.
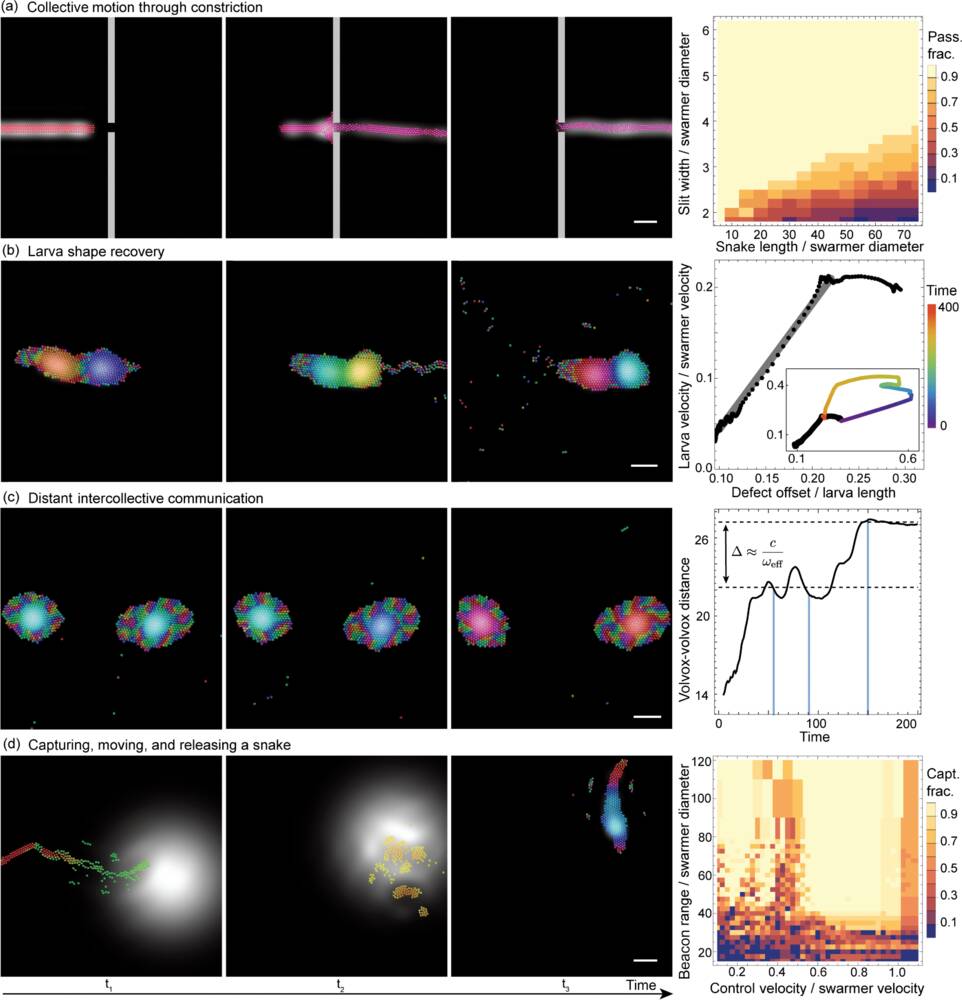
- Percezione Collettiva: Lo sciame può “sentire” l’ambiente circostante. Emettendo onde sonore e analizzando gli echi riflessi da un oggetto esterno (come un sonar biologico), può percepirne la presenza e reagire di conseguenza, ad esempio cambiando forma da “larva” (mobile) ad “ammasso” (stazionario) o disperdendosi.
- Resilienza e Auto-Riparazione: Queste non sono fragili macchine. Uno sciame a “serpente” può attraversare una stretta fessura, deformandosi e riassemblandosi dall’altra parte. Una “larva” a cui viene “tagliata” la testa (la zona dove viene generato il ritmo del movimento) è in grado di rigenerarla, ripristinando la sua piena funzionalità. Questa capacità di auto-guarigione è una caratteristica tipica dei sistemi viventi.
- Controllo Esterno: Proprio perché basati sul suono, questi sciami sono controllabili. È possibile usare un raggio acustico esterno per “catturare” uno sciame, trasportarlo in una posizione desiderata e poi rilasciarlo, un po’ come un pastore che guida il suo gregge con un fischio.
In conclusione, questa ricerca non presenta solo dei robot più intelligenti, ma un principio di progettazione completamente nuovo. Dimostra che da ingredienti minimi – movimento e comunicazione acustica – possono emergere complessità, intelligenza e robustezza. Le applicazioni, dalla somministrazione mirata di farmaci nel corpo umano alla bonifica di siti inquinati inaccessibili, sono tanto vaste quanto rivoluzionarie, e possono essere utilizzate er funzionalità che sono tutte da scoprire.

Domande e Risposte (FAQ)
1. Come fanno questi robot a “decidere” cosa fare senza un cervello centrale? Non c’è una “decisione” cosciente. L’intelligenza dello sciame è emergente, il che significa che nasce spontaneamente dalle interazioni locali basate su regole semplicissime. Ogni robot non sa nulla dello stato complessivo dello sciame; si limita a muoversi verso il suono più forte e a sincronizzare la propria frequenza. Il comportamento complesso e coordinato, come la formazione di un “serpente” o l’auto-riparazione, è il risultato collettivo di queste due sole azioni, ripetute da tutti i membri dello sciame.
2. Si tratta di robot fisici reali o di una simulazione al computer? Lo studio si basa su un modello computazionale e simulazioni, non ancora su robot fisici. Tuttavia, il modello è progettato per essere fisicamente realistico, definendo i principi fondamentali che governerebbero dei veri microrobot. La ricerca fornisce il “progetto” e la “ricetta” per costruire sciami fisici. Le sfide future riguarderanno la miniaturizzazione dell’hardware necessario (motori, microfoni, altoparlanti) per implementare questi principi su scala microscopica.
3. Quali sono le applicazioni pratiche più promettenti di questa tecnologia? Le potenzialità sono enormi. In medicina, sciami di microrobot potrebbero navigare nel flusso sanguigno per rilasciare farmaci direttamente su un tumore, minimizzando gli effetti collaterali. In campo ambientale, potrebbero essere usati per ripulire sversamenti di petrolio o neutralizzare inquinanti in aree inaccessibili. Potrebbero anche agire come sensori avanzati in ambienti ostili, esplorando zone disastrate o condotti industriali, riconfigurandosi per superare ostacoli e continuando a funzionare anche se parte dello sciame viene distrutta.

La Francia saluta la Fed: rimpatriato l’ultimo oro dagli USA. Una mossa tecnica, ma da 13 miliardi di utile (mentre l’Italia resta alla finestra)

Quando la SPD tedesca dice “riforma”, ma intende “tasse”: la nuova stangata sul ceto medio e sulle famiglie
Il Prezzo nascosto del “NO” al Nucleare

Crisi russo-ucraina e mercati energetici: l’export di petrolio del Kazakistan resiste a Novorossiysk, nonostante i danni

You must be logged in to post a comment Login