Attualità
Arriva il robot che si collega alla spalla e aiuta a svolgere i lavori ripetitivi e in posizioni scomode
la robotica morbida ha delle applicazioni pratiche, come, ad esempio, assistere nello svolgimento di lavori pesanti con molto meno sforzo fisico

i ricercatori hanno creato un robot morbido indossabile che può aiutare i muscoli della spalla quando si eseguono sollevamenti ripetitivi del braccio per lavori sopraelevati.
Il team dell’Università di Harvard ha sviluppato un robot indossabile che assiste solo quando è necessario e si spegne quando non viene utilizzato. Questo aiuta a ridurre lo sforzo richiesto da chi lo indossa per mantenere alzate le braccia. Il robot si indossa come una camicia e include un’unità di alimentazione portatile.
I test con i lavoratori hanno dimostrato che con il robot facevano lavorare i muscoli delle spalle e delle braccia il 40% in meno, senza far lavorare di più altri muscoli, come quelli della schiena.
I dettagli della ricerca del team sono stati pubblicati sulla rivista Science Robotics.
Un robot avanzato e “Morbido”
I disturbi muscoloscheletrici legati al lavoro sono un problema significativo, che causa quasi 70 milioni di visite mediche all’anno negli Stati Uniti.
I requisiti elevati nelle industrie ad alta intensità di lavoro, come il sollevamento delle braccia 4.600 volte al giorno nell’assemblaggio automobilistico, contribuiscono a questo rischio. Nel 2020, 63.100 infortuni alla spalla hanno comportato una media di 25 giorni di assenza dal lavoro, con un impatto sulla produttività e sui costi.
Inoltre con l’innalzamnto dell’età media dei lavoratori diventa sempre più importante trovare degli strumenti che facilitino lo svolgimento di attività di carattere fisico anche in persone non giovanissime e quindi mucloarmente più fragili.
Secondo i ricercatori, anche se l’automazione e gli ausili ergonomici riducono il rischio di lesioni, possono essere costosi e difficili da implementare. I dispositivi indossabili, come i supporti passivi per le spalle, offrono soluzioni versatili.
Tuttavia, a causa della resistenza, spesso aumentano l’attività muscolare antagonista. Bilanciare l’assistenza e la resistenza in questi dispositivi rimane una sfida per i compiti dinamici.
Ecco il robot di supporto gonfiabile con attuatori che si attivano al bisogno aiutando a sostenere i pesi e a lavorare in posizioni scomode
Al contrario, i robot attivi morbidi offrono un supporto controllabile con peso e ingombro minimi, grazie ai materiali non rigidi utilizzati. Nel momento in cui si sposta per guadagnare una posizione, può fornire il supporto necessario e poi spegnersi per non opporre resistenza all’utente, preservando il movimento naturale.
Originariamente destinati ad applicazioni mediche, questi robot funzionano in modo efficiente riducendo l’attività muscolare e potrebbero trovare applicazione nel lavoro industriale.
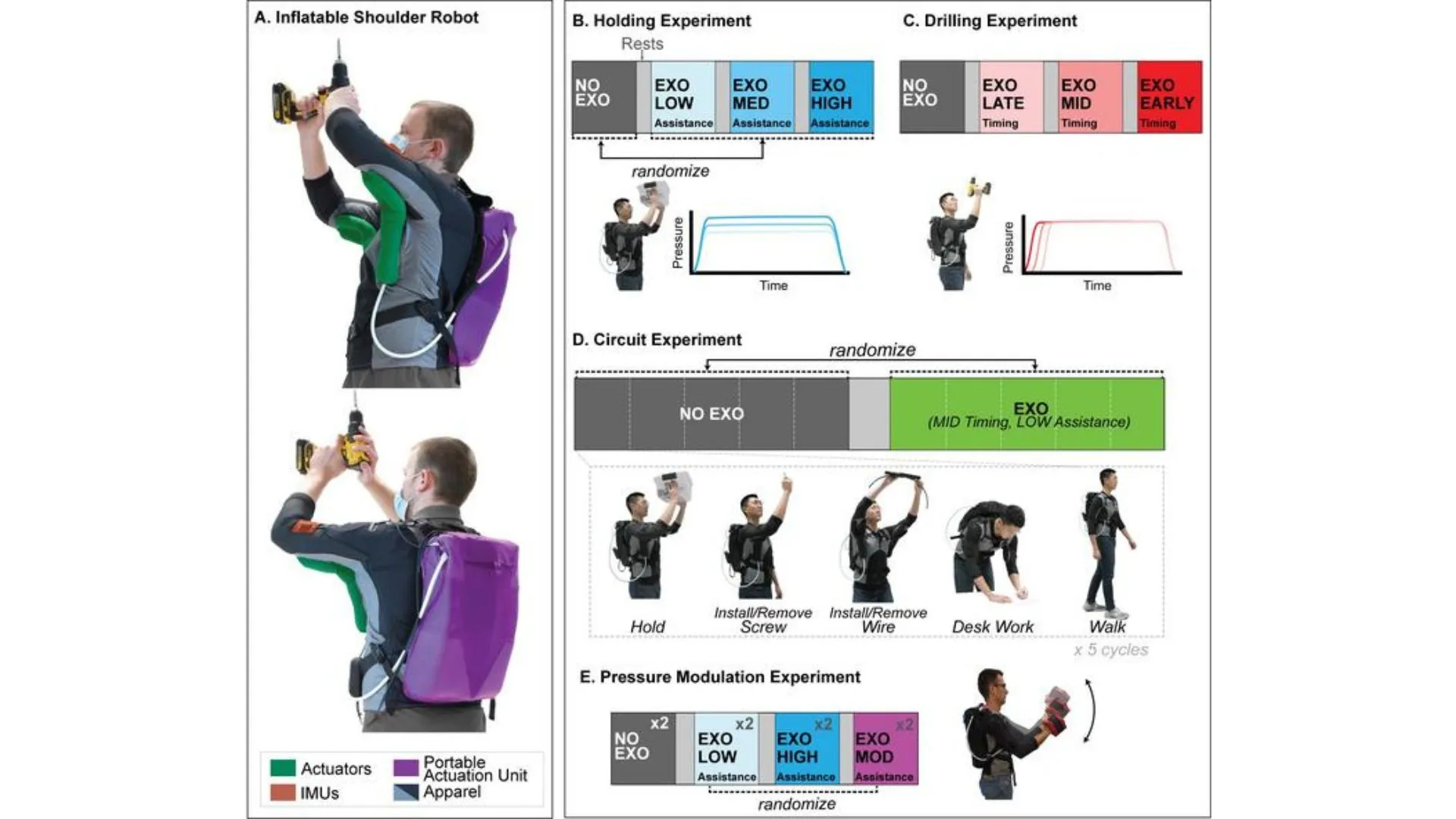
I ricercatori di Harvard hanno progettato e valutato un robot portatile, morbido e gonfiabile per i compiti industriali a spalla sollevata. Basandosi su un lavoro precedente, hanno sviluppato un’unità di attuazione portatile per l’uso non vincolato e hanno integrato tutti i componenti in un abbigliamento funzionale.
Il loro robot a spalla morbido e gonfiabile è dotato di due attuatori, tre unità di misurazione inerziale e un’unità di attuazione portatile integrata in un abbigliamento indossabile. In collaborazione con partner industriali, è stato progettato per sostenere 5 libbre (2,3 chilogrammi) per mano e pesare meno di 8,8 libbre (4 chilogrammi). Assiste entro 2 secondi dall’inizio di un compito.
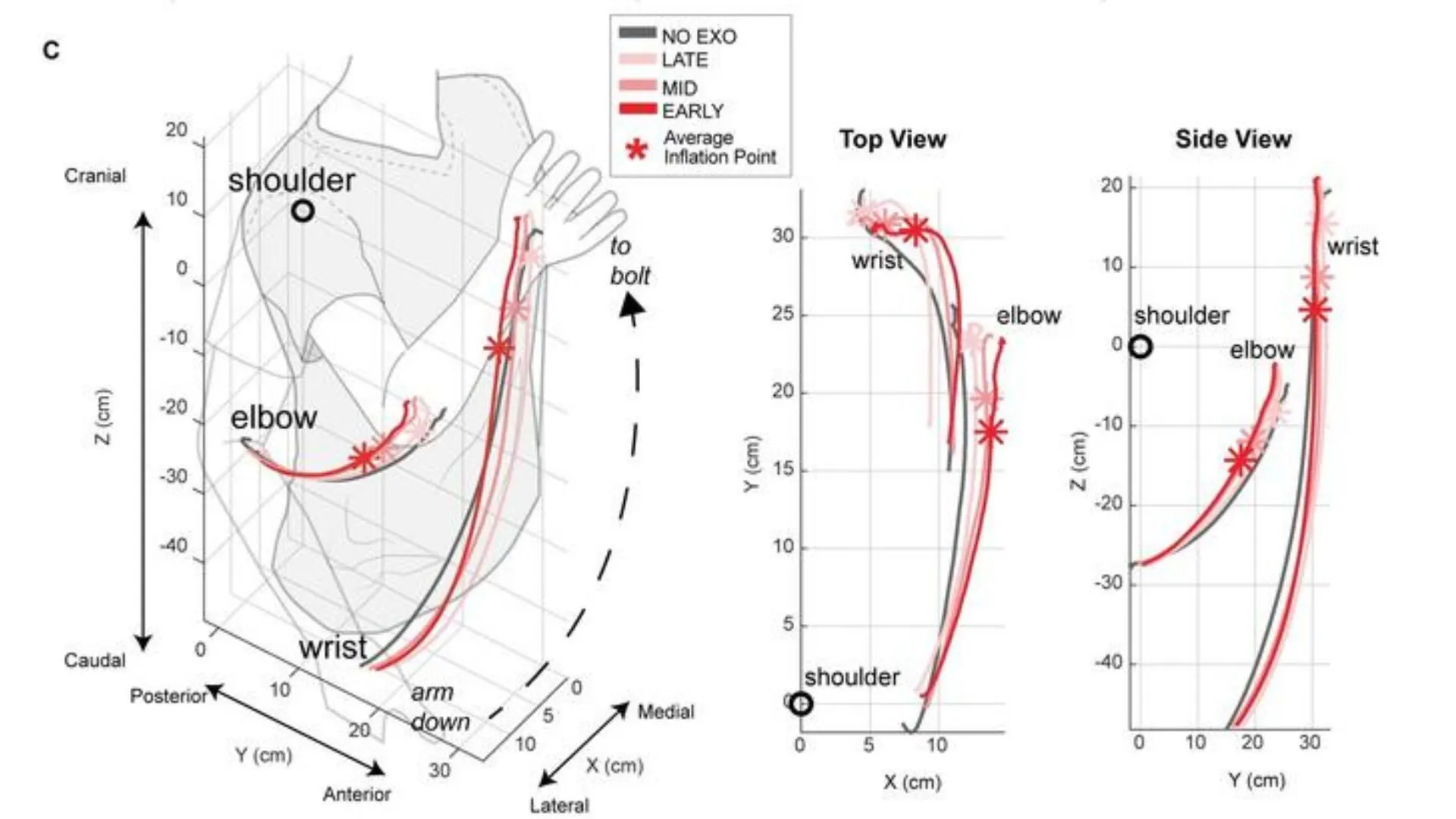
Utilizzando un controller avanzato della macchina a stati cinematici, hanno condotto esperimenti di simulazione di compiti industriali comuni per valutare l’impatto delle diverse tempistiche e pressioni di assistenza sull’attività muscolare e sulla biomeccanica.
Ridurre la tensione muscolare
Il team ha condotto tre esperimenti che hanno analizzato la cinematica dell’utente, l’attività muscolare e l’accuratezza del controller durante i compiti sopraelevati. Inoltre, i ricercatori hanno confrontato l’assistenza fissa e modulata durante un compito di presa dinamica, raccogliendo le preferenze degli utenti.
Le valutazioni dei partecipanti umani durante i compiti industriali simulati hanno mostrato che il robot ha ridotto le attività muscolari agoniste (deltoidi anteriori, medi e posteriori e bicipite brachiale) fino al 40 percento, con cambiamenti minimi negli angoli articolari (meno del 7 percento di escursione del movimento) e nessun aumento dell’attività muscolare antagonista (latissimus dorsi).
Come lavora il ribot e qual’è la riduzione dello sforzo muscolare
Il confronto dei parametri del controller da parte dei ricercatori ha rivelato che una forza di assistenza più elevata e una tempistica di assistenza più precoce hanno portato a riduzioni significative dell’attività muscolare. Inoltre il sistema sensoristico del controller ha lavorato in modo estremamente efficace, entrando in azione nel 96% dei casi in cui il sistema di assistenza era necessario.
![]()
Grazie al nostro canale Telegram potete rimanere aggiornati sulla pubblicazione di nuovi articoli di Scenari Economici.

Quali conseguenze avrà la fine dell’accordo sul petrodollaro sull’economia e sugli USA

ISS: le tute fanno acqua e ancora gli astronauti non sanno se potranno tornare

Lidl avrebbe utilizzato trucchi edilizi per aumentare l proprio fatturato

Il più antico luogo sepolcrale non è stato costruito dall’uomo

You must be logged in to post a comment Login